Design of Robot for Solar Panel Tempered Glass Pick and Place on Edge Handling Conveyor
-
Literature Survey: Researched available grippers and robots for smudge-free glass pick-and-place applications.
-
Force Calculation and Gripper Selection: Determined force requirements for picking and placing, leading to the selection of Bellows Suction Cups FSGPL by Schmalz and HT-1 based on material properties.
-
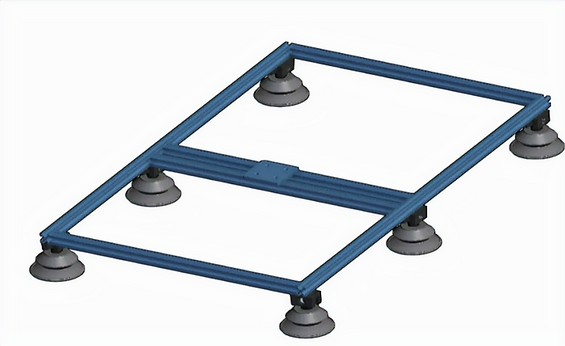
Vacuum End-Effector Design: Designed a framework compatible with the selected vacuum cups.
-
Robot Shortlisting: Identified compatible robots for the designed frame, resulting in the choice of a Gantry Robot with Heavy Duty Timing Belt Actuator and Enclosed Ball Screw Actuator.
-
Accessory Selection: Incorporated Piab VGS venturi vacuum generator, Proximity Sensor for object scanning, and Homing Sensor for human safety.
-
Cost-Effective Solution: Developed a pick-and-place system that's twice as cost-effective, with better repeatability and adaptable payload capacity compared to the existing solution.
-
Solution Verification: Utilized Ansys structural analysis to verify the solution, ensuring the tempered glass's deflection under operational conditions.
Gantry Robot with Linear Actuators
Vaccum End Effector with frame